
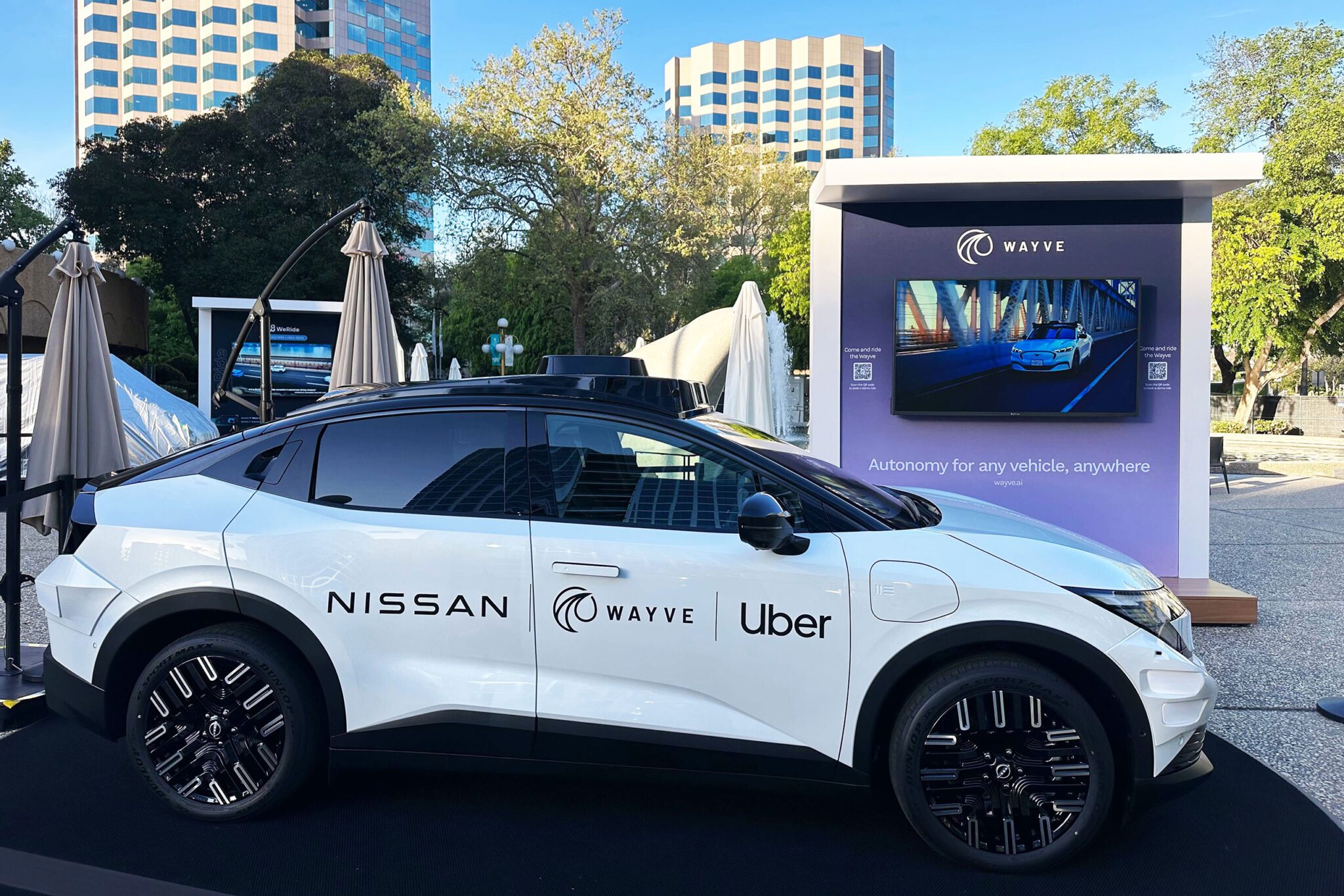
Wayve et Nissan exposent un prototype de robotaxi au Nvidia GTC 2026, construit sur la Nissan Leaf entièrement électrique et la plate-forme Nvidia DRIVE Hyperion. Le véhicule est destiné à être utilisé dans un projet pilote de robotaxi à Tokyo, prévu fin 2026 en collaboration avec Uber, sous réserve de discussions réglementaires.
Le prototype comprend deux processeurs Nvidia DRIVE AGX Thor, un réseau de caméras à 360 degrés, un radar d’imagerie surround et avant et un lidar orienté vers l’avant. Il fonctionne sur Nvidia DriveOS et est pris en charge par le cadre de sécurité fonctionnelle et de cybersécurité Nvidia Halos. Nissan développe des systèmes de véhicule entièrement redondants pour l’application robotaxi et ajoutera des écrans et des systèmes de communication en cabine avant le projet pilote.
AI Driver de Wayve utilise une approche d’IA incorporée de bout en bout qui traite directement les données des capteurs sans s’appuyer sur des cartes haute définition, apprenant comment les situations de circulation évoluent pour anticiper l’impact de ses actions sur les usagers de la route environnants. Le système est conçu pour fonctionner dans des environnements urbains dynamiques.
Au-delà de Tokyo, Wayve et Uber prévoient d’étendre les essais de robotaxi à plus de 10 villes dans le monde, dans le but de passer de pilotes supervisés par un opérateur de sécurité à des services sans conducteur évolutifs au fil du temps.
Dans un communiqué, les sociétés ont déclaré que l’intégration du pilote AI de Wayve s’appuie sur une collaboration continue entre Nissan et Wayve pour intégrer le logiciel dans la plate-forme automobile de Nissan, en ciblant une architecture de robot-taxi évolutive.
Source : Nissan